Yuheng Zhi's
Yuheng Zhi's
Home
Publications
Experiences
Skills
Light
Dark
Automatic
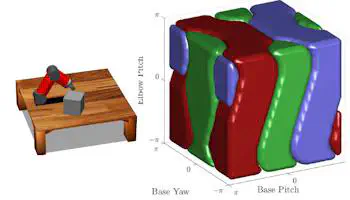
Configuration Space Decomposition for Scalable Proxy Collision Checking in Robot Planning and Control
Mrinal Verghese
,
Nikhil Das
,
Yuheng Zhi
,
Michael Yip
January, 2022
Featured
Cite
Video
Paper
Type
Journal
Publication
IEEE Robotics and Automation Letters
Yuheng Zhi
PhD Candidate
Cite
×